

近年来,得益于工业机器人市场的快速发展,中国运动控制行业进入到一个快速发展的阶段。而下游需求的进一步释放,也带动上游的高速发展,包括直线导轨、滚珠丝杠、齿轮齿条、液(气)压缸、齿轮、减速器等传动核心零部件也出现订单大幅增长的趋势,整个运控行业市场呈现出蓬勃向上的发展姿态。

我们都知道,工业机器人的驱动源通过传动部件来驱动关节的移动或转动,从而实现机身、手臂和手腕的运动。因此,传动部件是构成工业机器人的重要部件。而根据传动类型的不同,传动部件可以分为两大类:直线传动机构和旋转传动机构。今天,小编将和大家一起来深入学习了解。
工业机器人常用的直线传动机构可以直接由汽缸或液压缸和活塞产生,也可以采用齿轮齿条、滚珠丝杠螺母等传动元件由旋转运动转换得到。
1、移动关节导轨
在运动过程中移动关节导轨可以起到保证位置精度和导向的作用。
移动关节导轨有五种:普通滑动导轨、液压动压滑动导轨、液压静压滑动导轨、气浮导轨和滚动导轨。
目前第五种滚动导轨在工业机器人中应用最为广泛,如图2-15所示为包容式滚动导轨的结构,用支承座支承,可以方便地与任何平面相连,此时套筒必须是开式的,嵌入在滑枕中,既增强刚度也方便了与其他元件的连接。

2、齿轮齿条装置
齿轮齿条装置中(图2-16),如果齿条固定不动,当齿轮转动时,齿轮轴连同拖板沿齿条方向做直线运动。这样,齿轮的旋转运动就转换成拖板的直线运动。拖板是由导杆或导轨支承的,该装置的回差较大。

3、滚珠丝杠与螺母
在工业机器人中经常采用滚珠丝杠,这是因为滚珠丝杠的摩擦力很小且运动响应速度快。
由于滚珠丝杠螺母的螺旋槽里放置了许多滚珠,丝杠在传动过程中所受的是滚动摩擦力,摩擦力较小,因此传动效率高,同时可消除低速运动时的爬行现象;在装配时施加一定的预紧力,可消除回差。

如图2-17所示滚珠丝杠螺母里的滚珠经过研磨的导槽循环往复传递运动与动力,滚珠丝杠的传动效率可以达到90%。
4、液(气)压缸
液(气)压缸是将液压泵(空压机)输出的压力能转换为机械能、做直线往复运动的执行元件,使用液(气)压缸可以容易地实现直线运动。液 (气)压缸主要由缸筒、缸 盖、活塞、活塞杆和密封装置等部件构成,活塞和缸筒采用精密滑动配合,压力油(压缩空气)从液(气)压缸的一端进入,把活塞推向液 (气)压缸的另一端,从而实现直线运动。通过调节进入液 (气)压缸液压油(压缩空气)的流动方向和流量可以控制液(气)压缸的运动方向和速度。
一般电动机都能够直接产生旋转运动,但其输出力矩比所要求的力矩小,转速比要求的转速高,因此需要采用齿轮、皮带传送装置或其他运动传动机构,把较高的转速转换成较低的转速,并获得较大的力矩。运动的传递和转换必须高效率地完成,并且不能有损于机器人系统所需要的特性,包括定位精度、重复定位精度和可靠性等。通过下列传动机构可以实现运动的传递和转换。
1、齿轮副
齿轮副不但可以传递运动角位移和角速度,而且可以传递力和力矩,一个齿轮装在输入轴上,另一个齿轮装在输出轴上,可以得到齿轮的齿数与其转速成反比 [式 (2-1)],输出力矩与输入力矩之比等于输出齿数与输入齿数之比 [式 (2-2)]。

2、同步带传动装置
在工业机器人中同步带传动主要用来传递平行轴间的运动,同步传送带和带轮的接触面都制成相应的齿形,靠啮合传递功率。齿的节距用包络带 轮时的圆节距t表示。
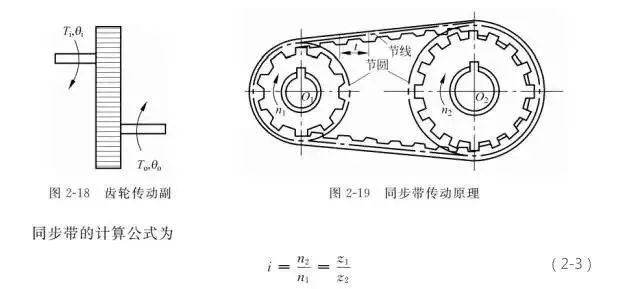
式中:n1为主动轮转速 (r/min);n2 为被动轮转速 (r/min);z1为主动轮齿数;z2 为被动轮齿数。
同步带传动的优点:传动时无滑动,传动比准确,传动平稳;速比范围大;初始拉力小;轴与轴承不易过载。但是,这种传动机构的制造及安装要求严格,对带的材料要求也较高,因而成本较高,同步带传动适合于电动机和高减速比减速器之间的传动。
3、 谐波齿轮
目前工业机器人的旋转关节有60%~70%都使用谐波齿轮传动。
谐波齿轮传动由刚性齿轮、谐波发生器和柔性齿轮三个主要零件组成。
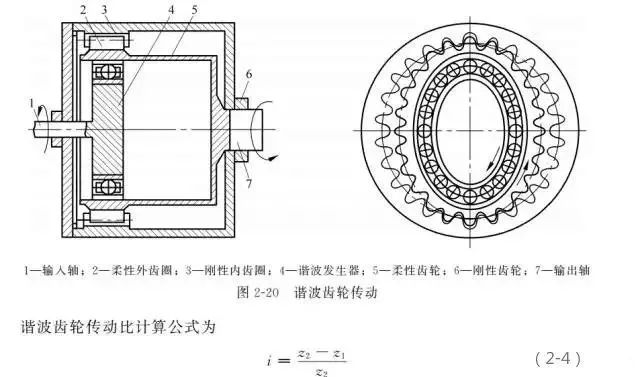
工作时,刚性齿轮6固定安装,各齿均布于圆周上,具有外齿圈2的柔性齿轮5沿刚性齿轮的内齿圈3转动。柔性齿轮比刚性齿轮少两个齿,所以柔性齿轮沿刚性齿轮每转一圈就反向转过两个齿的相应转角。
谐波发生器4具有椭圆形轮廓,装在其上的滚珠用于支承柔性齿轮,谐波发生器驱动柔性齿轮旋转并使之发生塑性变形。转动时,柔性齿轮的椭圆形端部只有少数齿与刚性齿轮啮合,只有这样,柔性齿轮才能相对于刚性齿轮自由地转过一定的角度。通常刚性齿轮固定,谐波发生器作为输入端,柔性齿轮与输出 轴相连。

式中:z1 为柔性齿轮的齿数;z2 为刚性齿轮的齿数。假设刚性齿轮有100个齿,柔性齿轮比它少两个齿,则当谐波发生器转50圈时,柔性齿轮转1圈,这样只占用很小的空间就可以得到1∶50的减速比。通常将谐波发生器装在输入轴,把柔性齿轮装在输出轴,以获得较大的齿轮减速比。
4、 摆线针轮传动减速器
摆线针轮传动是在针摆传动基础上发展起来的一种新型传动方式,20世纪80年代日本研制出了用于机器人关节的摆线针轮传动减速器,图2-21所示为摆线针轮传动简图。

它由渐开线圆柱齿轮行星减速机构和摆线针轮行星减速机构两部分组成。渐开线行星轮6与曲柄轴 5连成一体,作为摆线针轮传动部分的输入。
如果渐开线中心轮7顺时针旋转,那么,渐开线行星齿轮在公转 的同时还逆时针自转,并通过曲柄轴带动摆线轮做平面运动。此时,摆线轮因受与之啮合的针轮的约束,在其轴线绕针轮轴线公转的同时,还将反方向自转,即顺时针转动。同时,它通过曲柄轴推动行星架输出机构顺时针转动。



