

MOTOMAN INFORM 说明
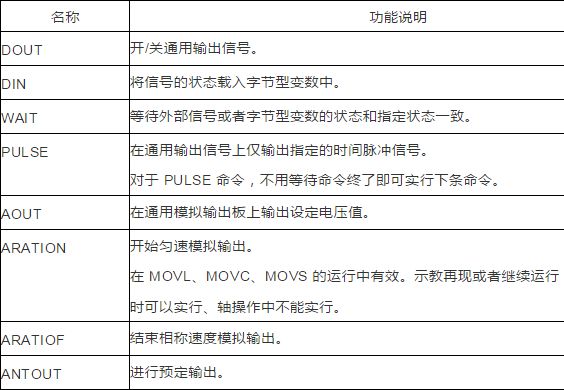
1.输出入命令
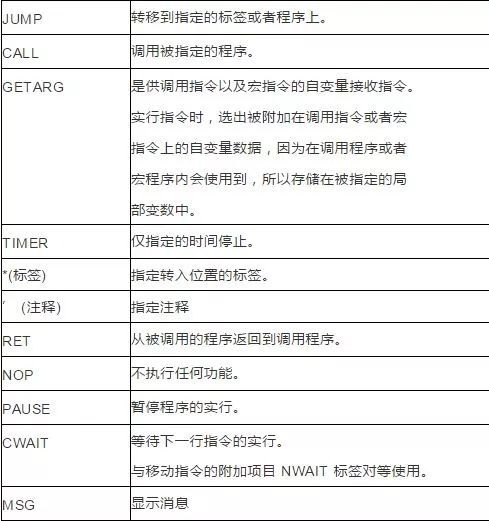
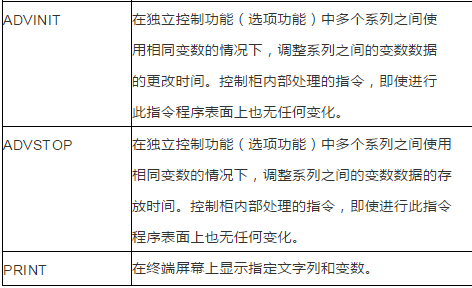
2.控制命令
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3、演算命令
| CLEAR | 将数据 1 上被指定的编号以后的变数的内容,以及数据 2 上仅被指定的个数都清除至 0。 |
| INC | 在被指定的变数内容上加上 1。 |
| DEC | 在被指定的变数内容上减掉 1。 |
| SET | 在数据 1 上设定数据 2。 |
| ADD | 将数据 1 和数据 2 相加,得出的结果保存在数据 1 上。 |
| SUB | 从数据 1 中减去数据 2,得出的结果保存在数据 1 上。 |
| MUL | 数据 1 和数据 2 相乘,得出的结果保存到数据 1 里。 |
| DIV | 数据 1 除数据 2,结果保存在数据 1 里。 |
| CNVRT | 通过指定数据 2 的脉冲型的位置型变数的坐标系,转换成 XYZ 型的位置型变数,保存到数据 1 里。 |
| AND | 算出数据 1 和数据 2 的逻辑积,结果保存到数据 1 里。 |
| OR | 算出数据 1 和数据 2 的逻辑和,结果保存到数据 1 里。 |
| NOT | 取数据 2 的逻辑否定,结果保存到数据 1 里。 |
| XOR | 数据 1 和数据 2 的按位相加,结果保存到数据 1 里。 |
| MFRAME | 由数据 1,数据 2,数据 3 的 3 个位置数据生成用户坐标。
数据 1 是显示定义点 ORG 的位置数据,数据 2 是 显示定义点 XX 的位置数据,数据 3 是显示定义点 XY 的位置数据。 |
| SETE | 在数据 1 的位置型变数的要素上设定数据 2。 |
| GETE | 将数据 2 的位置型变数的要素保存到数据 1 里。 |
| GETS | 将数据 2 的系统变数保存到数据 1 里。 |
| SQRT | 取数据 2 的 SQRT(√)、结果保存到数据 1 里。 |
| SIN | 取数据 2 的 SIN,结果保存到数据 1 里。 |
| COS | 取数据 2 的 COS,结果保存到数据 1 里。 |
| ATAN | 取数据 2 的 ATAN,结果保存到数据 1 里。 |
| MULMAT | 取数据 2 和数据 3 的矩阵积,结果保存到数据 1 里。 |
| INVMAT | 取数据 2 的逆矩阵,结果保存到数据 1。 |
| SETREG | 将指定的整数型变数数据复制到寄存器上。 |
| GETREG | 将指定的寄存器的数据复制到整数型变数上。 |
4、移动命令
| MOVJ | 通过链接插值移动至教示位置。
在机器人移动至目的地为止时的不限定轨迹区间里使用。 |
| MOVL | 以直线插值移动至教示位置。到教示的阶段为止以直线的轨迹移动。
在焊接区间等操作区间里经常使用。 |
| MOVC | 以圆弧插值向教示位置移动。绘制通过教示的 3 点的圆弧。 |
| MOVS | 以样条插值向教示位置移动。 |
| IMOV | 由现在位置设定的增量值以直线插补移动。 |
| SPEED | 指定 PLAY 速度,若被登录的移动命令上没有指定速度,则以 SPEED 命令上指定的速度来操作。 |
| REEP | 在程序上登录参照位置数据的指令。 能够使用的标签受程序的控制组限制。用 REFP 登录的位置数据,通过 GETS 命令能够读入到位置变数上。 |
5、移位命令
| SFTON | 开始操作平行移位。平行移位量通过各坐标系上的 X、Y、Z 的增量值,
设定位置型变数。 |
| SFTOF | 终了平行移位操作。 |
| MSHIFT | 由数据 2 和数据 3 在指定的坐标系上算出移位量,保存至数据 1。数据 2 显示进行平行移位时的基准位置,数据 3 显示目标位置(移位位置)。 |
6、附加命令的命令
| IF | 操作中判断各种的条件。进行处理其他命令之后附加使用。 |
| UNTIL | 在操作过程中判断输入条件。进行处理其他的命令之后附加使用。 |
| ENWAIT | 附加移动命令的 ENWAIT 命令,在被指定的时间前执行下一行
的移动命令以外的命令。 |
7、通用命令
| TOOLON | 打开操作指令。 |
| TOOLOF | 关闭操作指令。 |



