

随着对轨道车辆质量要求的不断提高,三维激光切割技术作为一种重要的加工手段,近几年在轨道车辆制造中获得应用。机器人激光切割技术具有精度高、柔性强、加工范围广等优势,可用于各种三维冲压件的切割加工。
2. 在轨道车辆制造中机器人激光切割技术应用现状
(1)机器人激光切割的优点 机器人激光切割激作为一种柔性的三维板金加工技术,除具有激光切割的优点外,还主要具有以下优点:①精度高。机器人激光切割激精度主要由激光切割精度和机械手运动精度决定。一般情况下,激光切割的光速定位精度在±0.03mm,切割面粗糙度12.5μm左右,切割的精度在0.1~0.3mm;而机械手的重复运动精度一般情况下为0.1~0.2mm,因此, 机器人激光切割激精度在±(0.2~0.5)mm。②柔性强。机器人激光切割具有三维和二维激光切割的功能,可以进行二、三维切割。同时,可以进行碳钢、不锈钢和铝合金等金属板材的加工,切割轨迹采用程序控制,因此可以进行多种产品的加工,具有较强的柔性。③加工范围广,可以完成复杂工件的加工。由机器人的允许轨迹再附加机器人轨道运动和工作台运动,构成复杂的空间运动,因此空间方位和可达的范围广,可以加工各种复杂的三维工件。
由于上述优点,机器人激光切割技术在轨道客车和其他行业中获得应用,大大提高了车辆制造质量,市场前景广阔。
(2)在轨道车辆制造中机器人激光切割技术应用现状 目前在轨道交通车辆制造中,虽然国内外的轨道车辆制造厂家广泛采用了激光加工和机器人技术,但机器人激光切割技术的应用却处于开始阶段。主要用于不锈钢、碳钢及铝合金等金属板料三维冲压件的切割加工,例如各种车顶弯梁、侧墙立柱等零件的三维切头和孔加工。由于采用机器人激光切割技术,代替了原来的无齿锯切割之后再用手工等离子切割三维形状的落后工艺,提高了工件的切割精度和质量,解决了工作场地砂轮粉尘等环境污染问题,改善了劳动环境,推动了切割技术的进步,具有较大的市场应用前景和潜在市场需求。机器人激光切割设备加工的产品示例如图1所示。
3. 机器人激光切割技术
机器人激光切割技术涉及机器人技术和激光切割技术,在轨道交通车辆制造中应用该技术和设备,除考虑产品特点、产能和激光设备及机器人设备的技术要求外,主要应解决以下几方面的技术问题。
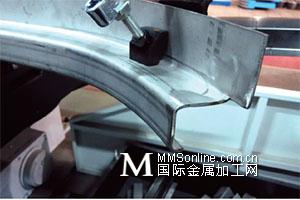
图1 机器人激光切割设备加工的产品示例
(1)选择合适的机器人和激光器 一般根据产品的形状、尺寸和机器人的性能选择合适的机器人规格,以满足切割轨迹的需要。当机器人轨迹受限,无法满足切割需要时,可以增加机器人的轨道运动和工作台运动来实现。激光器的选择主要根据切割的材料、切割速度要求及切割成本等因素综合考虑。机器人激光焊切割设备与切割机器人分别如图2、图3所示。

图2 机器人激光切割设备

图3 切割机器人
( 2 ) 随动三维激光割头 由于切割加工的产品种类多,形状复杂,切割的速度较快,因此必须采用随动三维激光割头,防止切割过程中碰撞。
(3)切割空间的封闭及除尘 由于切割轨迹是空间的,割嘴朝向是多方位的,因此切割时产生的烟尘和熔渣会沿各方位散落,为防止环境污染,切割空间必须封闭,同时在割头处或上部设置排烟除尘系统。
(4)交换工作台 为提高设备利用效率和生产效率,工作台应采用交换式,实现一边上料一边切割工作。工作台交换的方式因需求而异,一般常用的有水平旋转和垂直旋转两种方式。
(5)编程系统 编程系统必须便于编程和程序处理,能够进行离线编程和示教编程。必须有轨迹碰撞模拟系统,防止机器人运动时发生碰撞。
(6)切割状态的实时监控显示系统 由于切割是在封闭的空间进行,必须安装切割状态的实时监控显示系统,对切割的状态进行实时监控,同时防止人直接查看产生光线视觉损伤。
( 7 ) 切割废料的出料 可以采用人工或自动出料, 如传送带、料箱出料等。
( 8 ) 安全光栅保护系统 在设备的工作区域内应设置光栅保护系统,防止人身伤害和碰撞。一般设置在工作台前的上、下料操作区域。
(9)切割定位工装 根据产品结构和切割部位细节设计合理的切割定位工装,保证切割质量。工装要有型面定位、快速夹紧装置等机构(见图4)。

图4 工件在切割定位工装上的定位夹紧
4. 结语
机器人激光切割技术是机器人和激光切割技术的集成,随着轨道车辆制造技术的飞速发展,机器人激光切割技术作为轨道车辆制造的一种重要技术将会获得更大的需求和应用,对提高车辆的制造质量、制造水平将起到较大促进作用,同时,机器人激光切割技术也将取得快速的发展。
(文章来源:国际金属加工网)

