

工业机器人是一种靠自身动力和控制能力来执行工作任务的自动化机械装备,具有可自动控制、再编程及柔性等特点。在发达国家中,工业机器人自动化生产线已经成为自动化装备的主流和未来的发展方向。国外很多汽车行业、电子电器行业、工程机械、建筑、煤业化工等行业已经大量装备工业机器人自动化生产线,来保证产品质量,提高生产效率。
激光焊接产品
第一种是点焊机器人
点焊机器人是用于点焊自动作业的工业机器人,其末端持握的作业工具是焊钳。 实际上,工业机器人在焊接领域的应用※早是从汽车装配生产线上的电阻点焊开始的。※初,点焊机器人只用于增强焊作业,即往已拼接好的工件上增加焊点。后来,为保证拼接精度,又让机器人完成定位焊作业。点焊机器人逐渐被要求有更全的作业性能,点焊用机器人不仅要有足够的负载能力,而且在点与点之间移位时速度要快捷,动作要平稳,定位要准确,以减少移位的时间,提高工作效率。具体来说如下:安装面积小,工作空间大;快速完成小节距的多点定位(如每0.3~0.4s 移动 30~50mm 节距后定位); 定位精度高(± 0.25 mm ),以确保焊接质量; 持重大( 50~150 kg ),以便携带内装变压器的焊钳; 内存容量大,示教简单,节省工时; 点焊速度与生产线速度相匹配,同时安全可靠性好。
汽车工业中使用的点焊机器人
第二种是弧焊机器人
弧焊机器人是用于弧焊(主要有熔化极气体保护焊和非熔化极气体保护焊)自动作业的工业机器人,其末端持握的工具是焊枪。弧焊过程比点焊过程要复杂得多,被焊工件由于局部加热熔化和冷却产生变形,焊缝轨迹会发生变化。因此,焊接机器人的应用并不是一开始就用于电弧焊作业。而是伴随焊接传感器的开发及其在焊接机器人中的应用,使机器人弧焊作业的焊缝跟踪与控制问题得到有效解决.由于弧焊工艺早已在诸多行业中得到普及,使得弧焊机器人在通用机械、金属结构等许多行业中得到广泛运用。
弧焊机器人在工作
第三种是激光焊接机器人
激光焊接机器人是用于激光焊自动作业的工业机器人,通过高精度工业机器人实现更加柔性的激光加工作业,其末端持握的工具是激光加工头。 具有※小的热输入量,产生极小的热影响区,在显著提高焊接产品品质的同时,降低了后续工作量的时间 。激光焊接成为一种成熟的无接触的焊接方式已经多年,极高的能量密度使得高速加工和低热输入量成为可能。与机器人电弧焊相比,机器人激光焊的焊缝跟踪精度要求更高。其要求如下:高精度轨迹(≤ 0.1mm);持重大( 30~50 kg ),以便携带激光加工头;可与激光器进行高速通信;机械臂刚性好,工作范围大;具备良好的振动抑制和控制修正功能。
搬运工业机器人
(1)、龙门式搬运机器人
其坐标系主要由 X 轴、 Y 轴和 Z 轴组成。其多采用模块化结构,可依据负重吨位搬运,采用直角坐标系,编程方便快捷, 广泛运用于生产线转运及机床上下料等大批量生产过程。
(2)、悬臂式搬运机器人
其坐标系主要由 X 轴、 Y 轴和 Z 轴组成。其也可随不同的应用采取相应的结构形式 。广泛运用于卧式机床、立式机床及特定机床内部和冲压机热处理机床自动上下料。
(3)、侧壁式搬运机器人
其坐标系主要由 X 轴、 Y 轴和 Z 轴组成。其也可随不同的应用采取相应的结构形式。主要运用于立体库类,如档案自动存取、全自动银行保管箱存取系统等。
(4)、摆臂式搬运机器人
其坐标系主要由 X 轴、 Y 轴和 Z 轴组成。 Z 轴主要是升降,也称为主轴。 Y轴的移动主要通过外加滑轨, X 轴末端连接控制器,其绕 X 轴的转动,实现 4轴联动。 广泛应用于国内外生产厂家,是关节式机器人的理想替代品,但其负载程度相对于关节式机器人小。
悬臂式搬运机器人
(5)、 关节式搬运机器人
关节式搬运机器人是当今工业产业中常见的机型之一,其拥有 5~6 个轴,行为动作类似于人的手臂,具有结构紧凑、占地空间小、相对工作空间大、自由度高等特点,适合于几乎任何轨迹或角度的工作。
由以上可知,搬运机器人是一个完整系统。以关节式搬运机器人为例,其工作站主要有 操作机、控制系统、搬运系统(气体发生装置、真空发生装置和手爪等)和安全保护装置组成。结构如下图所示。
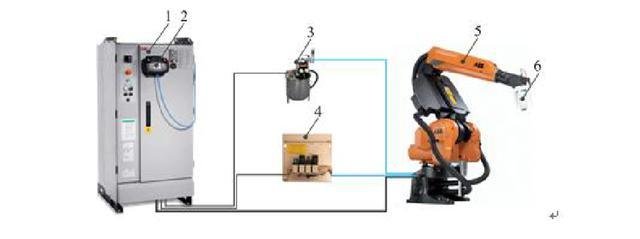
搬运机器人系统组成
第三大类为码垛机器人
码垛机器人在啤酒、饮料产业,可以实现码垛自动化 因此得到了广泛的应用。码垛机器人具有作业高效、码垛稳定等优点,解放工人繁重体力劳动,已在各个行业的包装物流线中发挥强大作用。其主要优点有很多方面,比如提高生产效率,解放繁重体力劳 ;柔性高、适应性强现不同物料码垛 ;改善工人劳动条件,摆脱有毒和有害环境 ;定位准确,稳定性高 等很多优点 。

码垛工业机器人
码垛机器人与搬运机器人在本体结构上没有过多区别,通常可认为码垛机器人本体较搬运机器人大,在实际生产当中码垛机器人多为四轴且多数带有辅助连杆,连杆主要起到增加力矩和平衡的作用,码垛机器人多不能进行横向或纵向移动,安装在物流线末端,常见的码垛机器人结构多为 关节式码垛机器人、摆臂式码垛机器人和龙门式码垛机器人 。对关节式码垛机器人来说常见本体多为 4 轴,亦有 5 、 6 轴码垛机器人,但在实际包装码垛物流线中 5 、 6 轴码垛机器人相对较少 。码垛主要在物流线末端进行工作,4 轴码垛机器人足以满足日常码垛。
第四大类是工业涂装机器人
涂装机器人作为一种典型的涂装自动化装备,涂装机器人与传统的机械涂装相比,其下优点有以下几个方面第一是能够※大限度提高涂料的利用率、降低涂装过程中的 VOC (有害挥发性有机物)排放量;第二是能显著提高喷枪的运动速度,缩短生产节拍,效率显著高于传统的机械涂装; 第三是柔性强,能够适应于多品种、小批量的涂装任务能够精准保证涂装工艺的一致性,获得较高质量的涂装产品 。涂装机器人大多数从构型上仍采取与通用工业机器人相似的 5 或6自由度串联关节式机器人,在其末端加装自动喷枪,按照手腕构型划分,涂装机器人主要有:球型手腕涂装机器人和非球型手腕涂装机器人。

非球型手腕涂装机器人
第五大类是装配机器人
装配机器人是工业生产中用于装配生产线上对零件或部件进行装配的一类工业机器人。作为柔性自动化装配的核心设备具有精度高、工作稳定、柔 顺性好、动作迅速等优点。装配机器人在不同装配生产线上发挥着强大的装配作用,装配机器人大多由 4-6 轴组成,就目前市场上常见的装配机器人,以臂部运动形式分 直角式装配机器人和关节式装配机器人, 关节式装配机器人亦分水平串联关节式、垂直串联关节式和并联关节式。

并联装配机器人
水平串联式装配机器人 亦称为平面关节型装配机器人或SCARA机器人,是目前装配生产线上应用数量※多的一类装配机器人。它属于精密型装配机器人,具有速度快、精度高、柔性好等特点,驱动多为交流伺服电机,保证其较高的重复定位精度,广泛运用于电子、机械和轻工业等有关产品的装配,适合工厂柔性化生产需求。
以上是工业机器人在现代化工厂中的应用,你认为还有那些应用场合欢迎讨论,留言!


