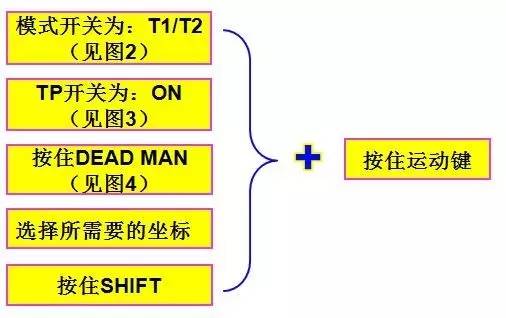
本篇将要介绍的是如何点动机器人,在点动机器人之前必须满足相关安全规定然后再进行点动。点动机器人必须要明确机器人的运动趋势和运动速度,并满足机器人的点动条件。
- AUTO(自动模式) :
在自动模式下,操作者面板有效,可通过操作面板的启动按钮或外围设备的I/O信号来启动机器人程序;此时TP开关必须关闭,TP不能点动机器人和启动程序;安全栏信号有效;机器人能以最高运行速度运行。
- T1模式(调试模式1) :
在T1模式下,操作者面板无效;TP开关置ON;程序只能通过TP启动;安全栏信号无效;机器人限速250mm/sec。
- T2模式(调试模式2) :
T2模式下,操作者面板无效;TP开关置ON;程序只能通过TP启动;安全栏信号无效;机器人能以指定速度运行。
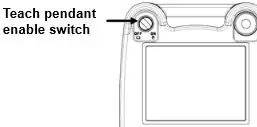
示教器有效无效开关。示教器有效时可以进行点动进给、程序创建、测试执行。示教器无效时,点动进给、程序创建、测试执行无法进行。
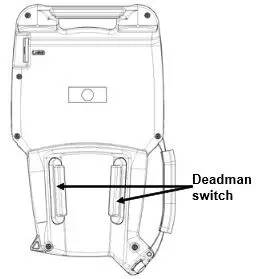
三位置安全开关,适当按住安全开关使其成为有效;有效时,从安全开关松开手、或者用力将其按住时,机器人就会停止并出现报警SRVO—003。按住任意一边deadman开关后按RESET键即可消除报警并使其成为有效。
任意一个SHIFT键与其他按键同时被按下时,可以进行机器人的点动进给、位置数据的示教、程序的启动。

图5:点动键
综上所述,把模式开关置于T1或T2档,将TP开关置为有效,根据运动趋势和运动速度选取所需要的示教坐标系和速度倍率,然后按住任意一边的Deadman开关,同时按下SHIFT键和点动键即可点动机器人。